
В заголовке использованы аббревиатуры английских выражений, поскольку они уже устоялись в отличие от терминов и тем более их сокращений в русском языке. На родном языке припишем этим сокращениям следующие выражения: FPV (First Person View или Flight Per Video) -вид от первого лица или полет по видео, передаваемому с летательного аппарата, OSD (On-Screen Display) - вывод на экран поверх картинки телеметрической информации.
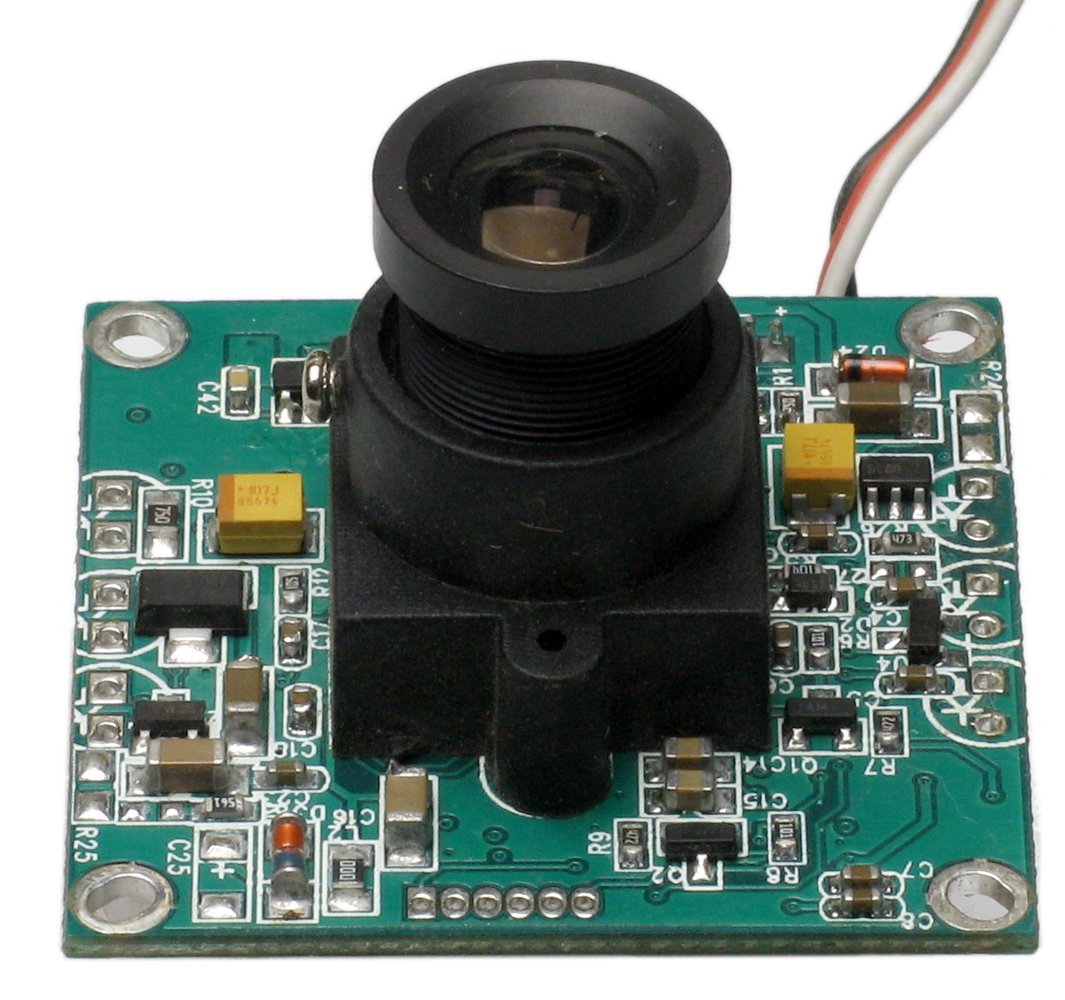
Для начала надо получить картинку. Для этого можно использовать отдельную видеокамеру:
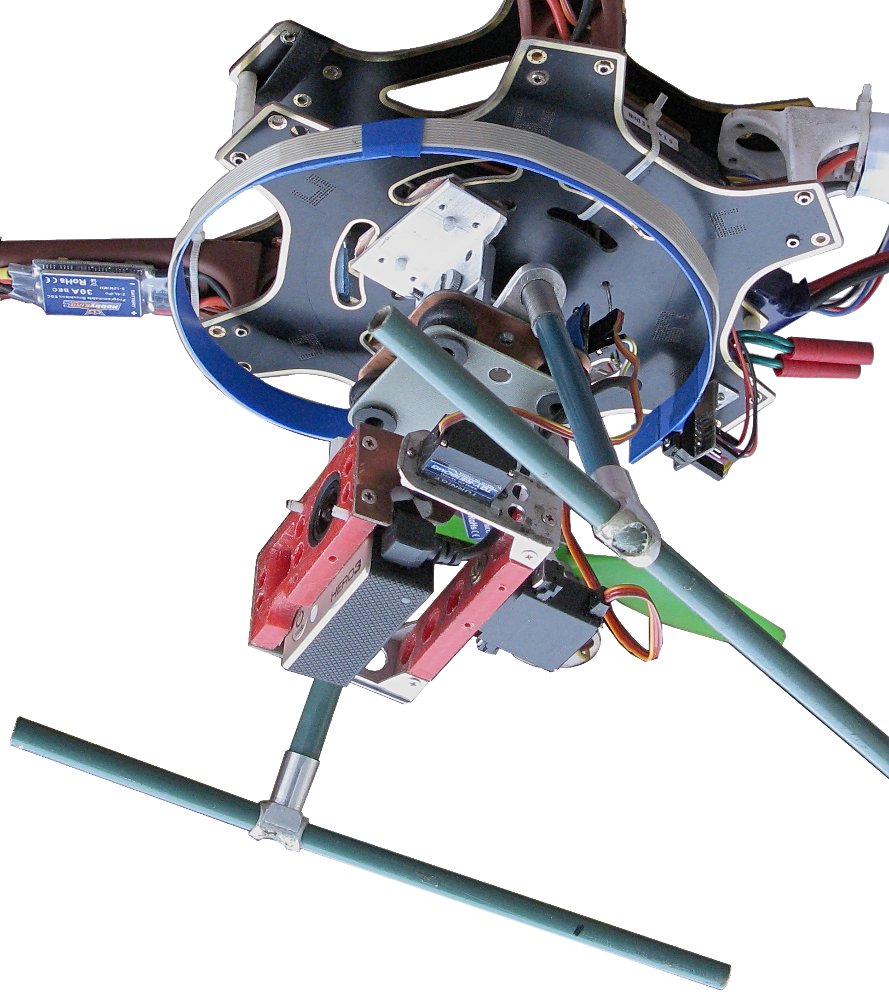
А можно взять видеосигнал и с камеры, предназначенной для фотосъемки. На фотографии ниже сигнал берется с камеры GoPro HERO3. У каждого решения есть свои плюсы и минусы. Съемочная камера не всегда повернута по курсу, но беря сигнал с нее, мы можем получить и дополнительную информацию о режиме съемки и видеть в реальном времени снимаемую картинку.
После того как сигнал с изображением получен, к аналоговому изображению надо подмешать цифровую информацию от бортового компьютера. Для этого используем еще один компьютер типа Arduino, преобразующий сигнал, получаемый через последовательный порт от бортового компьютера и преобразующий ее в аналоговый телевизионный сигнал, накладываемый на изображение с видеокамеры.
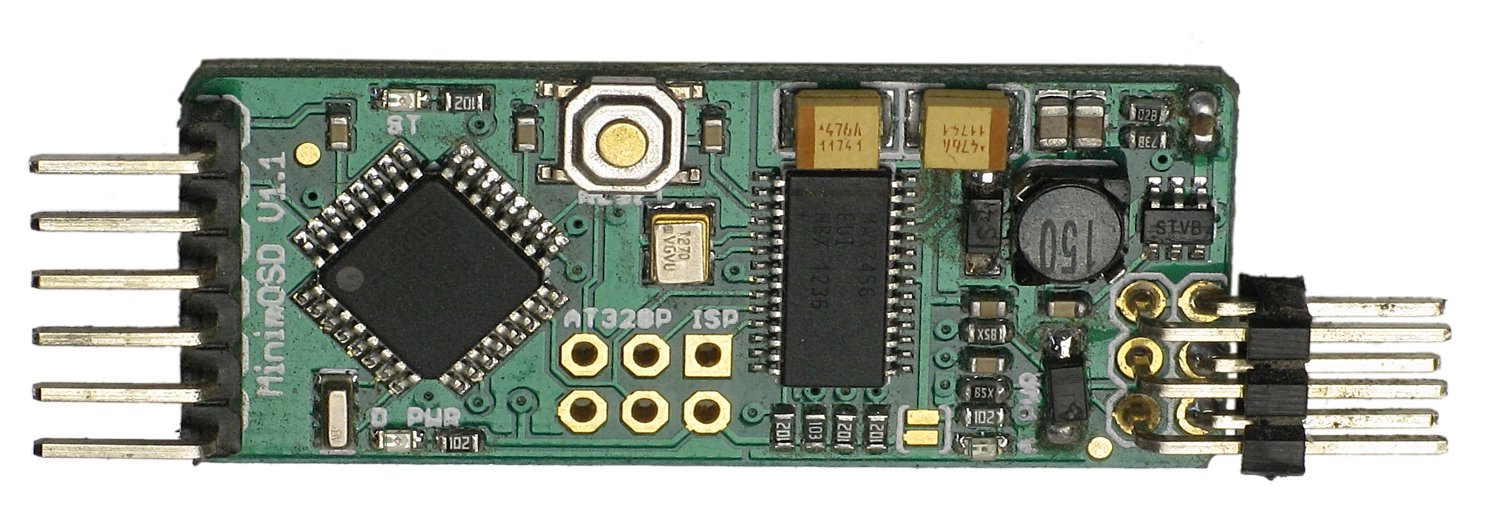
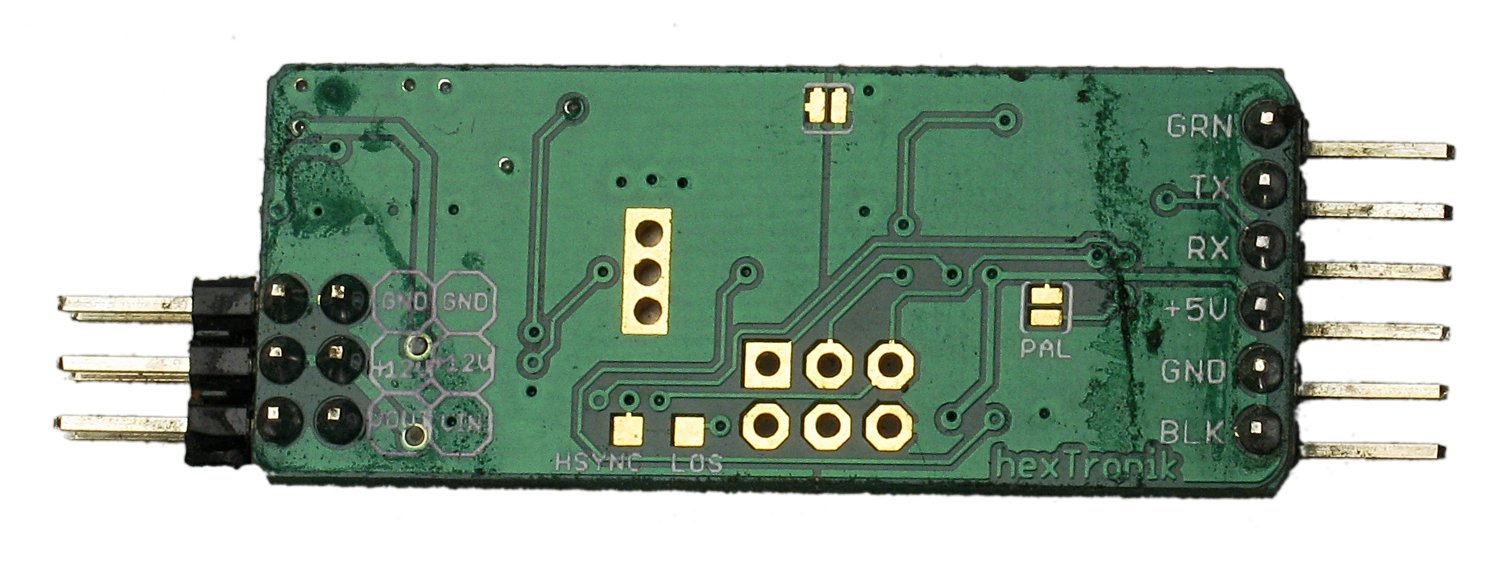
Плата программируется и настраивается через последовательный порт. Для подключения к компьютеру понадобится переходник FTDI на USB и программа Arduino. Я использовал прошивку от KV Team OSD версии r370. Графический интерфейс настройки, изображенный ниже, к сожалению, работает только с 32 разрядными версиями ОС.

Теперь надо передать сигнал с летательного аппарата на землю. Для этого можно использовать передатчики, работающие на разной частоте. Я использовал диапазон 900 МГц.
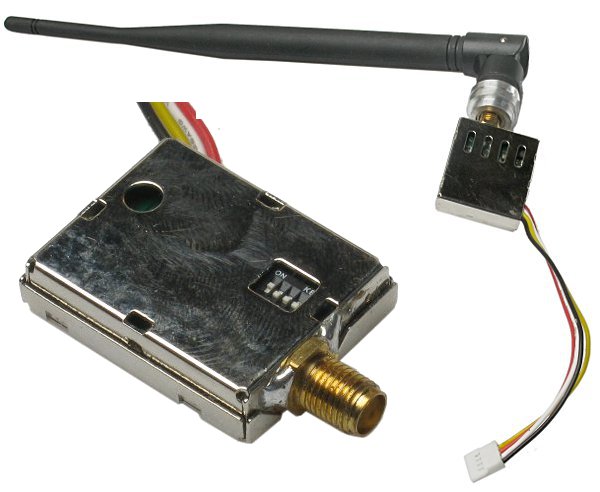
Чтобы сигнал принять, нужен приемник, я воспользовался нижеприведенным 12 канальным устройством. Нумерация каналов на передатчике и на приемнике у меня не совпала. 1 канал передатчика принимался на 3 канале приемника.

И вывести на экран. Если таскать с собой телевизор или специальные очки, то подключаемся напрямую, ну а если хочется использовать компьютер, который обычно все равно желательно иметь для настройки летательного аппарата, то придется аналоговый сигнал как-то завести в него. Одно из самых простых решений - системы видеозахвата с выходом USB.

Здесь возможны подводные камни, так как устройства под кодовым названием EasyCAP выглядят все совершенно одинаково, но имеют разную начинку. Мое оказалось с микросхемой SMI-2021 от Somagic и для его использования пришлось обратиться к проекту easycap-somagic-linux. Далее все прошло гладко. В целом под Linux устройство оказалось работоспособным и достаточно легко настраиваемым. Правда, не слишком удобным в работе, особенно если надо одновременно и смотреть и записывать картинку. Для работы надо сначала запустить программу инициализации somagic-init, а затем программу somagic-capture и mplayer с параметрами:
somagic-capture | \ mplayer -vf yadif,screenshot -demuxer rawvideo \ -rawvideo "pal:format=uyvy:fps=25" -aspect 4:3 -
А для записи:
somagic-capture | \ ffmpeg -f rawvideo -pix_fmt uyvy422 -vtag 2vuy -s 720x576 -y -r pal -i - \ -f alsa -i hw:0,0 -aspect 1.3333 -b:v 2200k output1.avi
Единичная попытка подключить его к машине с Windows 7, для которой оно и предназначено, успехом у меня не увенчалась. Ну, впрочем, я уже забыл, как с этой ОС работать, и у ее верных адептов, возможно, проблем не возникнет.
В результате получаем ниже приведенную картинку. К сожалению, текстовая информация с камеры накладывается на телеметрию и полностью ее развести с помощью графического интерфейса настройки не удается. Можно, конечно, выключить вывод информации камеры на экран, но состояние батареи камеры и режим съемки являются очень полезной информацией и ее лучше видеть. Можно выключить отображение координат, от них мало толку при пилотировании, но они крайне полезны при поиске, если вертолет потерпел аварию, особенно если велась запись сеанса.

Кроме вывода информации, Minim OSD позволяет через экранные меню производить и настройку и калибровку основного компьютера летательного аппарата, но мне для этих целей удобнее пользоваться подключением через Bluetooth.